Konveksni skup
U geometriji, podskup Euklidovog prostora, ili specifičnije afini prostor nad realnim brojevima, je konveksan ako, sa bilo koje dve tačke, on povezuje ceo linijski segment koji ih povezuje. Ekvivalentno, konveksni skup ili konveksni region je podskup koji preseca svaku liniju u jednom linijskom segmentu (verovatno praznom).[1][2] Na primer, čvrsta kocka je konveksni skup, dok sve što je šuplje ili ima udubljenje, na primer, oblik polumeseca, nije konveksno.


Granica konveksnog skupa je uvek konveksna kriva. Presek svih konveksnih skupova koji sadrže dati podskup A Euklidovog prostora naziva se konveksni omotač A. To je najmanji konveksni skup koji sadrži A.
Konveksna funkcija je realno vrednosna funkcija definisana na intervalu sa svojstvom da je njegov epigraf (skup tačaka na ili iznad grafikona funkcije) konveksni skup. Konveksna minimizacija je potpolje optimizacije koje izučava problem minimizacije konveksnih funkcija nad konveksnim skupovima. Prva grana matemakia posvećena izučavanju svojstava konveksnih skupova i konveksnih funkcija se naziva konveksna analiza.
Pojam konveksnog skupa može se generalizovati, kao što je opisano u daljem tekstu.
Definicije
uredi
Neka je S vektorski prostor ili afini prostor nad realnim brojevima, ili, generalnije, nad nekim uređenim poljem. Ovim su obuhvaćeni Euklidovi prostori, koji su afini prostori. podskup C od S je konveksan ako je za svako x i y u C, linijski segment koji povezuje x i y uključen u C. To znači da afina kombinacija (1 − t)x + ty pripada C, za svako x i y u C, i t na intervalu [0, 1]. To podrazumeva da je konveksnost (svojstvo da je konveksan) invarijantna pod afinim trasformacijama. Time se isto tako podrazumeva da je konveksni skup u realnom ili kompleksnom topološkom vektorskom prostoru povezan putanjom, i stoga povezan.
Skup C je striktno konveksan ako je svaka tačka na linijskom segmentu koji povezuje x i y izuzev krajnjih tačaka u unutrašnjosti C.
Skup C je apsolutno konveksan ako je konveksan i balansiran.
Konveksni podskupovi iz R (skupa realnih brojeva) su intervali i tačke iz R. Neki primeri konveksnih podskupova Euklidske ravni su čvrsti pravilni mnogouglovi, čvrsti trouglovi i preseci čvrstih trouglova. Neki primeri konveksnih podskupova Euklidskog trodimenzionalnog prostora su Arhimedova tela i pravilni poliedri. Poliedri Kepler-Puansoa su primeri nekonveksnih skupova.
Nekonveksni skup
urediSkup koji nije koveksan se naziva nekonveksni skup. Mnogougao koji nije konveksni poligon se ponekad naziva konkavni poligon,[3] a neki izvori generalnije koriste termin konkavni skup sa značenjem nekonveksni skup,[4] mada ta upotreba većinom nije dozvoljena.[5][6]
Komplement konveksnog skupa, kao što je epigraf konkavne funkcije, se ponekad naziva reverzni konveksni skup, posebno u kontekstu matematičke optimizacije.[7]
Svojstva
urediNeka je dato r tačaka u1, ..., ur u konveksnom skupu S, i r nenegativnih brojeva λ1, ..., λr takvih da je λ1 + ... + λr = 1, afina kombinacija pripada S. Kako je definicija konveksnog skupa slučaj r = 2, ovo svojstvo karakteriše konveksne skupove.

Takva afina kombinacija naziva se konveksna kombinacija u1, ..., ur.
Preseci i unije
urediKolekcija konveksnih podskupova vektorskog prostora, afinog prostora ili euklidskog prostora ima sledeća svojstva:[8][9]
- Prazan skup i ceo prostor su konveksni.
- Presek bilo koje kolekcije konveksnih skupova je konveksan.
- Unija niza konveksnih skupova je konveksna, ako oni čine neopadajući lanac za uključivanje. Za ovo svojstvo, ograničenje na lance je važno, pošto unija dva konveksna skupa ne mora biti konveksna.
Zatvoreni konveksni skupovi
urediZatvoreni konveksni skupovi su konveksni skupovi koji sadrže sve svoje granične tačke. Mogu se okarakterisati kao preseci zatvorenih poluprostora (skupovi tačaka u prostoru koje leže na jednoj strani hiperravni).
Iz ovoga što je upravo rečeno jasno je da su takvi preseci konveksni, a biće i zatvoreni skupovi. Da bi se dokazalo obrnuto, tj. da se svaki zatvoreni konveksni skup može predstaviti kao takav presek, potrebna je prateća teorema o hiperravni u obliku da za dati zatvoreni konveksni skup C i tačku P van njega postoji zatvoreni poluprostor H koji sadrži C a ne P. Prateća teorema o hiperravni je poseban slučaj Han–Banahove teoreme funkcionalne analize.[10][11][12]
Konveksni skupovi i pravougaonici
urediNeka je C konveksno telo u ravni (konveksan skup čija unutrašnjost nije prazna). Može se upisati pravougaonik r u C tako da je homotetička kopija R od r opisana oko C. Pozitivni odnos homotetije je najviše 2 i:[13]

Blački-Santalo dijagrami
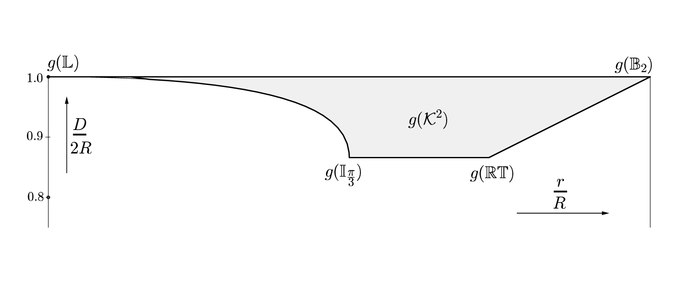
urediSkup svih ravnih konveksnih tela može se parametrizovati u smislu prečnika konveksnog tela D, njegovog radijusa r (najveći krug koji se nalazi u konveksnom telu) i njegov radijus kruga R (najmanji krug koji sadrži konveksno telo). Zapravo, ovaj skup se može opisati skupom nejednakosti koje daje[14][15] i može se vizualizovati kao slika funkcije g koja preslikava konveksno telo u tačku R2 datu sa (r/R, D/2R). Slika ove funkcije je poznata (r, D, R) Blački-Santalov dijagram.[15]








Alternativno, skup takođe može biti parametrizovan njegovom širinom (najmanja udaljenost između bilo koje dve različite paralelne hiperravni), perimetrom i površinom.[14][15]

Ostala svojstva
urediNeka je X topološki vektorski prostor i neka je konveksan.

- i su oba konveksna (tj. zatvaranje i unutrašnjost konveksnih skupova su konveksni).
- Ako je i onda je (gde je ).
- Ako je onda je:
- , i
- , gde je algebarska unutrašnjost C.










Konveksni omotači i Minkovskijeve sume
urediKonveksni omotači
urediSvaki podskup A vektorskog prostora je sadržan u najmanjem konveksnom skupu (koji se naziva konveksna ljuska A), odnosno preseku svih konveksnih skupova koji sadrže A. Operator konveksne ljuske Conv() ima karakteristična svojstva operatora ljuske:
- opširna: S ⊆ Conv(S),
- neopadajuća: S ⊆ T implicira da je Conv(S) ⊆ Conv(T), i
- idempotentna: Conv(Conv(S)) = Conv(S).
Operacija konveksne ljuske je potrebna da bi skup konveksnih skupova formirao rešetku, u kojoj je operacija „spajanja“ konveksni omotač unije dva konveksna skupa Presek bilo koje kolekcije konveksnih skupova je sam po sebi konveksan, tako da konveksni podskupovi (realnog ili kompleksnog) vektorskog prostora formiraju kompletnu rešetku.

Sabiranje Minkovskog
uredi![Tri kvadrata su prikazana u nenegativnom kvadrantu kartezijanske ravni. Kvadrat Q1 = [0, 1] × [0, 1] je zelen. Kvadrat Q2 = [1, 2] × [1, 2] je braon, i nalazi se unutar tirkiznog kvadrata Q1+Q2=[1,3]×[1,3].](/wiki/%D0%94%D0%B0%D1%82%D0%BE%D1%82%D0%B5%D0%BA%D0%B0:Minkowski_sum_graph_-_vector_version.svg)
U realnom vektorskom prostoru, Minkovskijev zbir dva (neprazna) skupa, S1 i S2, je definisan kao skup S1 + S2 formiran dodavanjem vektora po elementima iz skupova sabiraka Uopštenije, zbir Minkovskog konačne porodice (nepraznih) skupova Sn je skup formiran sabiranjem vektora po elementima


Za sabiranje Minkovskog, nulti skup {0} koji sadrži samo nulti vektor 0 ima posebnu važnost: Za svaki neprazan podskup S vektorskog prostora u algebarskoj terminologiji, {0} je element identiteta Minkovskijevog sabiranja (na kolekciji nepraznih skupova).[19]

Konveksni ljuske Minkovskih suma
urediMinkovskijevo dodavanje se dobro ponaša u odnosu na operaciju uzimanja konveksnih ljuski, kao što pokazuje sledeći predlog:
Neka su S1, S2 podskupovi realnog vektorskog prostora, konveksni omotač njihovog Minkovskijevog zbira je zbir njihovih konveksnih omotača

Ovaj rezultat važi uopštenije za svaku konačnu kolekciju nepraznih skupova:

U matematičkoj terminologiji, operacije Minkovskijevogog sabiranja i formiranja konveksnih ljuski su komutativne operacije.[20][21]
Minkovskijeva suma konveksnih skupova
urediZbir Minkovskog dva kompaktna konveksna skupa je kompaktan. Zbir kompaktnog konveksnog skupa i zatvorenog konveksnog skupa je zatvoren.[22]
Sledeća poznata teorema, koju je dokazao Diudoni 1966. godine, daje dovoljan uslov da razlika dva zatvorena konveksna podskupa bude zatvorena.[23] Ona koristi koncept recesionog konusa nepraznog konveksnog podskupa S, definisanog kao: gde je ovaj skup konveksan konus koji sadrži i zadovoljava . Treba imati na umu da ako je S zatvoren i konveksan onda je zatvoren i za svako ,






Teorema (Diudoni). Neka su A i B neprazni, zatvoreni i konveksni podskupovi lokalno konveksnog topološkog vektorskog prostora takvog da je linearni podprostor. Ako je A ili B lokalno kompaktan onda je A − B zatvoren.

Generalizacije i proširenja za konveksnost
urediPojam konveksnosti u euklidskom prostoru može se generalizovati modifikacijom definicije u nekim ili drugim aspektima. Koristi se uobičajeni naziv „generalizovana konveksnost“, jer rezultujući objekti zadržavaju određena svojstva konveksnih skupova.
Zvezdasto-konveksni (zvezdasti) skupovi
urediNeka je C skup u realnom ili kompleksnom vektorskom prostoru. C je zvezdasto konveksan (u obliku zvezde) ako postoji x0 u C tako da je segment linije od x0 do bilo koje tačke y u C sadržan u C. Otuda je neprazan konveksan skup uvek zvezdasto konveksan, ali zvezdsto konveksni skup nije uvek konveksan.
Ortogonalna konveksnost
urediPrimer generalizovane konveksnosti je ortogonalna konveksnost.[24]
Skup S u euklidskom prostoru naziva se ortogonalno konveksan ili orto-konveksan, ako bilo koji segment paralelan bilo kojoj od koordinatnih ose koje spajaju dve tačke od S leži potpuno unutar S. Lako je dokazati da je presek bilo koje kolekcije ortokonveksnih skupova ortokonveksan. Važe i neka druga svojstva konveksnih skupova.
Neeuklidska geometrija
urediDefinicija konveksnog skupa i konveksnog omotača prirodno se proširuje na geometrije koje nisu euklidske definisanjem geodetski konveksnog skupa kao skupa koji sadrži geodetske koje spajaju bilo koje dve tačke u skupu.
Topologija reda
urediKonveksnost se može proširiti za potpuno uređen skup X koji ima topologiju poretka.[25]
Neka je Y ⊆ X. Potprostor Y je konveksan skup ako je za svaki par tačaka a, b u Y takav da je a ≤ b, interval [a, b] = {x ∈ X | a ≤ x ≤ b} sadržan u Y. To jest, Y je konveksan ako i samo ako za svako a, b u Y, a ≤ b implicira [a, b] ⊆ Y.
Konveksan skup generalno nije povezan: kontra-primer je dat podprostorom {1,2,3} u Z, koji je i konveksan i nije povezan.
Prostori konveksnosti
urediPojam konveksnosti se može generalizovati na druge objekte, ako se kao aksiome izaberu određena svojstva konveksnosti.
Za dati skup X, konveksnost nad X je kolekcija 𝒞 podskupova X koja zadovoljava sledeće aksiome:[8][9][26]
- Prazan skup i X su u 𝒞
- Presek bilo koje kolekcije iz 𝒞 je u 𝒞.
- Unija lanca (u pogledu inkluzivne relacije) elemenata od 𝒞 je u 𝒞.
Elementi 𝒞 se nazivaju konveksni skupovi, a par (X, 𝒞) se naziva prostor konveksnosti. Za običnu konveksnost važe prve dve aksiome, a treća je trivijalna.
Za alternativnu definiciju apstraktne konveksnosti, koja je pogodnija za diskretnu geometriju, pogledajte konveksne geometrije povezane sa antimatroidima.
Konveksni prostori
urediKonveksnost se može generalizovati kao apstraktna algebarska struktura: prostor je konveksan ako je moguće uzeti konveksne kombinacije tačaka.
Reference
uredi- ^ Morris, Carla C.; Stark, Robert M. Finite Mathematics: Models and Applications (на језику: енглески). John Wiley & Sons. стр. 121. ISBN 9781119015383. Приступљено 5. 4. 2017.
- ^ Kjeldsen, Tinne Hoff. „History of Convexity and Mathematical Programming” (PDF). Proceedings of the International Congress of Mathematicians (ICM 2010): 3233—3257. doi:10.1142/9789814324359_0187. Архивирано из оригинала (PDF) 11. 8. 2017. г. Приступљено 5. 4. 2017.
- ^ McConnell, Jeffrey J. (2006), Computer Graphics: Theory Into Practice, стр. 130, ISBN 0-7637-2250-2.
- ^ Weisstein, Eric W. „Concave”. MathWorld.
- ^ Takayama, Akira (1994), Analytical Methods in Economics, University of Michigan Press, стр. 54, ISBN 9780472081356, „An often seen confusion is a "concave set". Concave and convex functions designate certain classes of functions, not of sets, whereas a convex set designates a certain class of sets, and not a class of functions. A "concave set" confuses sets with functions.”
- ^ Corbae, Dean; Stinchcombe, Maxwell B.; Zeman, Juraj (2009), An Introduction to Mathematical Analysis for Economic Theory and Econometrics, Princeton University Press, стр. 347, ISBN 9781400833085, „There is no such thing as a concave set.”
- ^ Meyer, Robert (1970), „The validity of a family of optimization methods” (PDF), SIAM Journal on Control and Optimization, 8: 41—54, MR 0312915.
- ^ а б Soltan, Valeriu, Introduction to the Axiomatic Theory of Convexity, Ştiinţa, Chişinău, 1984 (in Russian).
- ^ а б Singer, Ivan (1997). Abstract convex analysis. Canadian Mathematical Society series of monographs and advanced texts. New York: John Wiley & Sons, Inc. стр. xxii+491. ISBN 0-471-16015-6. MR 1461544.
- ^ Luxemburg, W. A. J. (1962). „Two Applications of the Method of Construction by Ultrapowers to Analysis”. Bulletin of the American Mathematical Society. American Mathematical Society. 68 (4): 416—419. ISSN 0273-0979. doi:10.1090/s0002-9904-1962-10824-6
 .
.
- ^ Narici, Lawrence (2007). „On the Hahn-Banach Theorem”. Advanced Courses of Mathematical Analysis II (PDF). World Scientific. стр. 87—122. ISBN 978-981-256-652-2. doi:10.1142/9789812708441_0006. Приступљено 7. 7. 2022.
- ^ Narici, Lawrence; Beckenstein, Edward (1997). „The Hahn–Banach Theorem: The Life and Times”. Topology and Its Applications. 77 (2): 193—211. doi:10.1016/s0166-8641(96)00142-3.
- ^ Lassak, M. (1993). „Approximation of convex bodies by rectangles”. Geometriae Dedicata. 47: 111—117. S2CID 119508642. doi:10.1007/BF01263495.
- ^ а б Santaló, L. (1961). „Sobre los sistemas completos de desigualdades entre tres elementos de una figura convexa planas”. Mathematicae Notae. 17: 82—104.
- ^ а б в Brandenberg, René; González Merino, Bernardo (2017). „A complete 3-dimensional Blaschke-Santaló diagram”. Mathematical Inequalities & Applications (на језику: енглески) (2): 301—348. ISSN 1331-4343. arXiv:1404.6808 . doi:10.7153/mia-20-22 .
- ^ Klee, Victor (1971), „Shapes of the future”, The Two-Year College Mathematics Journal, 2 (2): 14—27, JSTOR 3026963, doi:10.2307/3026963.
- ^ Alsina, Claudi; Nelsen, Roger B. (2011), Icons of Mathematics: An Exploration of Twenty Key Images, Dolciani Mathematical Expositions, 45, Mathematical Association of America, p. 155, ISBN 978-0-88385-352-8.
- ^ Moon, F. C. (2007), The Machines of Leonardo Da Vinci and Franz Reuleaux: Kinematics of Machines from the Renaissance to the 20th Century, History of Mechanism and Machine Science, 2, Springer, ISBN 978-1-4020-5598-0.
- ^ The empty set is important in Minkowski addition, because the empty set annihilates every other subset: For every subset S of a vector space, its sum with the empty set is empty: .
- ^ Theorem 3 (pages 562–563): Krein, M.; Šmulian, V. (1940). „On regularly convex sets in the space conjugate to a Banach space”. Annals of Mathematics. Second Series. 41 (3): 556—583. JSTOR 1968735. doi:10.2307/1968735.
- ^ For the commutativity of Minkowski addition and convexification, see Theorem 1.1.2 (pages 2–3) in Schneider; this reference discusses much of the literature on the convex hulls of Minkowski sumsets in its "Chapter 3 Minkowski addition" (pages 126–196): Schneider, Rolf (1993). Convex bodies: The Brunn–Minkowski theory. Encyclopedia of mathematics and its applications. 44. Cambridge: Cambridge University Press. стр. xiv+490. ISBN 0-521-35220-7. MR 1216521.
- ^ Lemma 5.3: Aliprantis, C.D.; Border, K.C. (2006). Infinite Dimensional Analysis, A Hitchhiker's Guide. Berlin: Springer. ISBN 978-3-540-29587-7.
- ^ Zălinescu, C. (2002). Convex analysis in general vector spaces
 . River Edge, NJ: World Scientific Publishing Co., Inc. стр. 7. ISBN 981-238-067-1. MR 1921556.
. River Edge, NJ: World Scientific Publishing Co., Inc. стр. 7. ISBN 981-238-067-1. MR 1921556.
- ^ Rawlins G.J.E. and Wood D, "Ortho-convexity and its generalizations", in: Computational Morphology, 137-152. Elsevier, 1988.
- ^ Munkres, James; Topology, Prentice Hall; 2nd edition (December 28, 1999). ISBN 0-13-181629-2.
- ^ van De Vel, Marcel L. J. (1993). Theory of convex structures. North-Holland Mathematical Library. Amsterdam: North-Holland Publishing Co. стр. xvi+540. ISBN 0-444-81505-8. MR 1234493.

Literatura
uredi- Andrew, A. M. (1979), „Another efficient algorithm for convex hulls in two dimensions”, Information Processing Letters, 9 (5): 216—219, doi:10.1016/0020-0190(79)90072-3
- Artin, Emil (1967), „2.5. Newton's Polygon”, Algebraic Numbers and Algebraic Functions, Gordon and Breach, стр. 37—43, MR 0237460
- Auel, Asher (2019), „The mathematics of Grace Murray Hopper” (PDF), Notices of the American Mathematical Society, 66 (3): 330—340, MR 3889348
- Avis, David; Bremner, David; Seidel, Raimund (1997), „How good are convex hull algorithms?”, Computational Geometry, 7 (5-6): 265—301, MR 1447243, doi:10.1016/S0925-7721(96)00023-5
- Bárány, Imre; Katchalski, Meir; Pach, János (1982), „Quantitative Helly-type theorems”, Proceedings of the American Mathematical Society, 86 (1): 109—114, MR 663877, doi:10.2307/2044407
- Basch, Julien; Guibas, Leonidas J.; Hershberger, John (1999), „Data structures for mobile data”, Journal of Algorithms, 31 (1): 1—28, CiteSeerX 10.1.1.134.6921 , MR 1670903, doi:10.1006/jagm.1998.0988
- Birkhoff, Garrett (1935), „Integration of functions with values in a Banach space”, Transactions of the American Mathematical Society, 38 (2): 357—378, MR 1501815, doi:10.2307/1989687
- Brown, K. Q. (1979), „Voronoi diagrams from convex hulls”, Information Processing Letters, 9 (5): 223—228, doi:10.1016/0020-0190(79)90074-7
- de Berg, M.; van Kreveld, M.; Overmars, Mark; Schwarzkopf, O. (2008), Computational Geometry: Algorithms and Applications (3rd изд.), Springer
- Chan, Timothy M. (2012), „Three problems about dynamic convex hulls”, International Journal of Computational Geometry and Applications, 22 (4): 341—364, MR 2994585, doi:10.1142/S0218195912600096
- Chang, J. S.; Yap, C.-K. (1986), „A polynomial solution for the potato-peeling problem”, Discrete & Computational Geometry, 1 (2): 155—182, MR 834056, doi:10.1007/BF02187692
- Chazelle, Bernard (1985), „On the convex layers of a planar set”, IEEE Transactions on Information Theory, 31 (4): 509—517, MR 798557, doi:10.1109/TIT.1985.1057060
- Chazelle, Bernard (1993), „An optimal convex hull algorithm in any fixed dimension” (PDF), Discrete & Computational Geometry, 10 (1): 377—409, CiteSeerX 10.1.1.113.8709 , doi:10.1007/BF02573985
- Chen, Qinyu; Wang, Guozhao (mart 2003), „A class of Bézier-like curves”, Computer Aided Geometric Design, 20 (1): 29—39, doi:10.1016/s0167-8396(03)00003-7
- Cranston, M.; Hsu, P.; March, P. (1989), „Smoothness of the convex hull of planar Brownian motion”, Annals of Probability, 17 (1): 144—150, JSTOR 2244202, MR 972777
- Demaine, Erik D.; Gassend, Blaise; O'Rourke, Joseph; Toussaint, Godfried T. (2008), „All polygons flip finitely ... right?”, Surveys on Discrete and Computational Geometry, Contemporary Mathematics, 453, Providence, Rhode Island: American Mathematical Society, стр. 231—255, MR 2405683, doi:10.1090/conm/453/08801
- Dirnböck, Hans; Stachel, Hellmuth (1997), „The development of the oloid” (PDF), Journal for Geometry and Graphics, 1 (2): 105—118, MR 1622664
- Edelsbrunner, Herbert; Kirkpatrick, David G.; Seidel, Raimund (1983), „On the shape of a set of points in the plane”, IEEE Transactions on Information Theory, 29 (4): 551—559, doi:10.1109/TIT.1983.1056714
- Gardner, L. Terrell (1984), „An elementary proof of the Russo-Dye theorem”, Proceedings of the American Mathematical Society, 90 (1): 171, MR 722439, doi:10.2307/2044692
- Gel'fand, I. M.; Kapranov, M. M.; Zelevinsky, A. V. (1994), „6. Newton Polytopes and Chow Polytopes”, Discriminants, Resultants, and Multidimensional Determinants, Mathematics: Theory & Applications, Birkhäuser, стр. 193—213, ISBN 0-8176-3660-9, MR 1264417, doi:10.1007/978-0-8176-4771-1
- Getz, Wayne M.; Wilmers, Christopher C. (2004), „A local nearest-neighbor convex-hull construction of home ranges and utilization distributions” (PDF), Ecography, Wiley, 27 (4): 489—505, doi:10.1111/j.0906-7590.2004.03835.x
- Graham, Ronald L.; Yao, F. Frances (1983), „Finding the convex hull of a simple polygon”, Journal of Algorithms, 4 (4): 324—331, MR 729228, doi:10.1016/0196-6774(83)90013-5
- Grünbaum, Branko (2003), Convex Polytopes, Graduate Texts in Mathematics (2nd изд.), Springer, ISBN 9780387004242
- Gustin, William (1947), „On the interior of the convex hull of a Euclidean set”, Bulletin of the American Mathematical Society, 53: 299—301, MR 20800, doi:10.1090/S0002-9904-1947-08787-5
Spoljašnje veze
uredi- Hazewinkel Michiel, ур. (2001). „Convex subset”. Encyclopaedia of Mathematics. Springer. ISBN 978-1556080104.
- Lectures on Convex Sets, notes by Niels Lauritzen, at Aarhus University, March 2010.